December 1-2: Deception Island
 Chinstrap penguins "porpoise" through the water in the research vessel's wake
Chinstrap penguins "porpoise" through the water in the research vessel's wakeDecember 1-2, 2006
On board the RV Yuzhmorgeologiya
Port Foster, Deception Island
What a glorious day this has been! The weather was as close to perfect as I could imagine. Blue skies and calm, turquoise seas greeted us when we awoke this morning. The craggy peaks of Deception Island lay off the starboard bow. Porpoising chinstrap penguins accompanied us as we made our transit into its sunken caldera.
 Andrew and Bill with water sample extracted from Niskin bottle.
Andrew and Bill with water sample extracted from Niskin bottle.Deception Island is one of the few active volcanoes breaking the surface of the Southern Ocean. We are attempting to locate and sample hydrothermal vents that may be lurking beneath the waters of its caldera, Port Foster. Once again we cast the Niskin bottle rosette off the stern of the Yuzhmorgeologiya, hoping to capture water samples bearing telltale elements of helium and metals. But a more direct technique would be to actually see the shimmering hot seawater as it exits the vent.
 Bob and Minkyu preparing to deploy the ROV.
Bob and Minkyu preparing to deploy the ROV.We began our search in a section of Port Foster aptly named Fumarole Bay. From the ship we could see white, wispy vapors rising from its shoreline. A full crew loaded into the Korean zodiac with all of the ROV equipment. Each of us had a specific role. Bob was at the ROV control box, manipulating switches and a joystick to direct the ROV’s thrusters and camera. Joe was positioned in front of the flat screen monitor and instrument panel, providing the essential feedback to Bob of the ROV’s current orientation. Haru was both the engineer and data recorder. Dr. Minkyu Park, with the assistance of two Korean technicians, was responsible for the Zodiac’s operation and deployment of the ROV’s cable. I was fortunate enough to be included in order to record the entire operation on digital video.
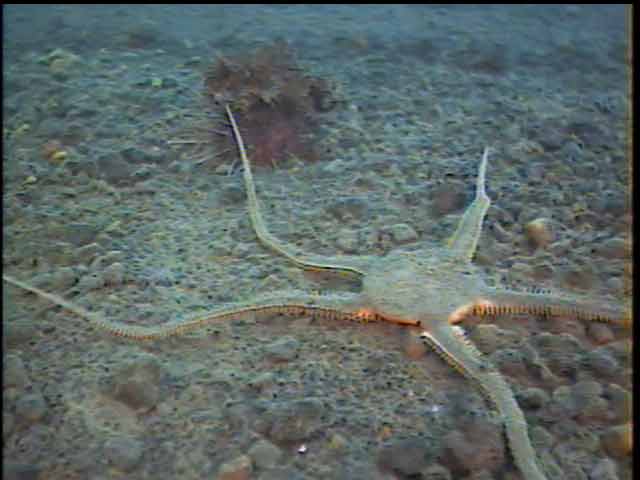 Brittle star and sea urchin image captured by ROV at 20-meter depth
Brittle star and sea urchin image captured by ROV at 20-meter depthAs we approached the shoreline of Fumarole Bay, we were greeted by the strong “rotten egg” odor of hydrogen sulfide. The team conducted six deployments of the ROV along transect lines from 10 to 50 meters in depth. Though we were unsuccessful in locating any apparent hydrothermal vent systems, we were delighted to see a menagerie of underwater creatures. Brittle stars and sea urchins were everywhere. The ROV’s camera captured images of other marine invertebrates that we have tentatively identified as soft corals, amphipods, krill, sea stars, ctenophores, tunicates, sea anemones and sponges. Upon our return to the U.S.A., these will be posted on Oregon Sea Grant’s and NOAA’s Ocean Exploration websites.
 Joe, Minku, Bob and Haru with the Spanish Antarctic base commander
Joe, Minku, Bob and Haru with the Spanish Antarctic base commanderWe had been invited to visit the Spanish base located nearby on the shores of Port Foster. The Spanish maintain seasonal bases both here and on Livingston Island. The gracious base commander, a major in the Spanish army, greeted us. A delightful tea, and an offer to assist us tomorrow with a Zodiac and Spanish crew capped the tour he provided.
 Joe Haxel, Bob and the Korean pilot controlling the submerged ROV
Joe Haxel, Bob and the Korean pilot controlling the submerged ROVOn the morning of Saturday, December 2nd, the ROV group (with Bob, Del, and Joe) prepared to venture again into Fumarole Bay in order to collect more underwater images and, perhaps, find an active thermal vent. This would be the ROV’s seventh dive in the caldera of Deception Island. Simultaneously, Kate and Andrew, with the assistance of a Zodiac inflatable boat and two members of the Spanish Antarctic Base, wanted to sample real-time underwater sounds using a hand-held portable hydrophone. The data from this recording would supplement other records from the area that indicate the presence of leopard seals, which are known to prey on the local penguin colonies.
 Andrew, in his Mustang suit, listens to sounds collected by the hydrophone.
Andrew, in his Mustang suit, listens to sounds collected by the hydrophone.During these recordings, it is important to minimize introduced sounds such as boat motors or clumsy handling of the instrument. Our Spanish hosts were generous enough to travel some distance away from our ROV comrades and the Yuzhmorgeologiya, and cut the boat engine entirely. Now drifting, and listening in with headphones and a digital data recorder, the hydrophone was lowered to a depth about 5 meters. Unavoidably, the idling Yuzhmorgeologiya made its presence heard, but on other frequencies analyzed later in the lab, mammal sounds can be discovered in the record. Unfortunately for our effort, an incoming low-pressure system reversed our good weather from the previous day, and snow and high winds forced an early return to the ship. Still, data was found, and the trip afforded another friendly interaction with our Spanish colleagues.
The weather deteriorated further, resulting in snow flurries, high wind and whitecaps. Undaunted, we deployed the ROV off the starboard side of the Yuzhmorgeologiya to a 115 meter depth. Though we still didn’t see a hydrothermal vent, our efforts were rewarded by our first fleeting view of an unidentified fish. Because of poor weather conditions, further explorations were cut short, and we left Deception Island to spend night at sea.
posted by Pat Kight @ 11:32 AM
2 comments
![]()
![]()



2 Comments:
Are the peguins jiggly too?
star group
the penguins look cute jumping in the air Oh was it freezing in the morning their. :D I was wondering if you had a fun time their because if not you should of tooken some students they would of luved to see wildlife down their. By Viola spicer
Post a Comment
<< Home